A Knee Actuation Story
We are back to work on the design of a new knee-actuation for the exoskeleton. We have done all the preliminary work during the first semester and now are in the phase of design.
This is the interesting part, we're getting to the practical side of it all. This comes with a few new challenges. For example, usually in a course you have the course material and then exercises to understand the course material.
For a project of this kind you have to figure out what is the course material and create your own exercises by asking the right questions (probably the most difficult part of it all).
My objective currently is to determine how much torque (spinning force) we need to make the knee-joint work and thus what motor we should use. The amount of research that goes into understanding and recreating the simple movement of a knee is remarkable to me.
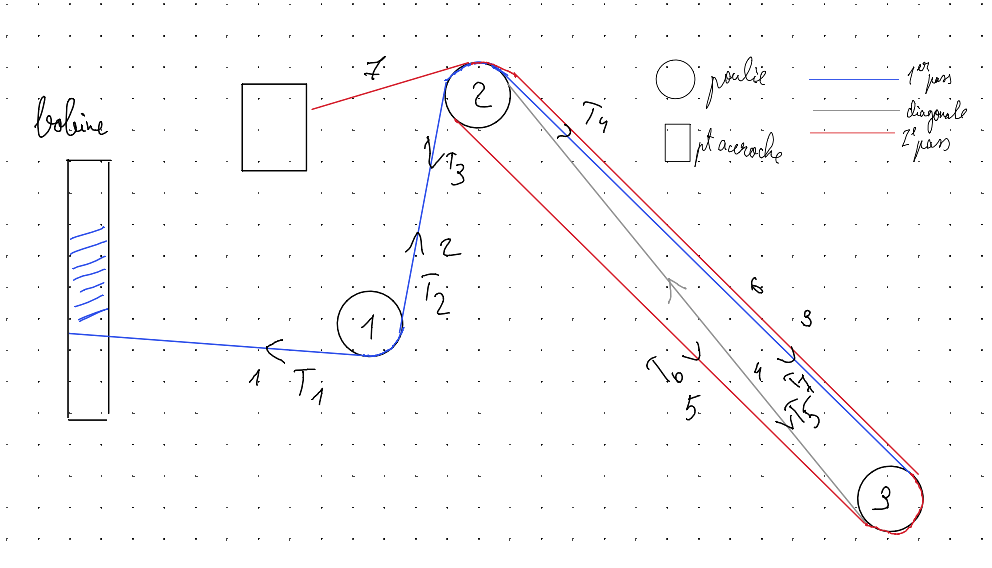
This Sunday I spent a solid 3 hours simply on pulley-cable systems and trying to put together how they can be used. Fun fact, did you know that, if you set up your pulleys correctly you can lift 100kg with 10kg of force? Is that not amazing?
The reason this is interesting is that with pulleys we can use a less powerful motor that can still do the same work. All while being smaller and lighter than the current solution. Now we just have to crunch the numbers and get to the sweet spot.
This Week's Suggestions:
🎶 "Trafalgar Square (Original Mix)" by Adrien Calvet:
This Thursday I will be closing a bpm.fam event after Adrien Calvet. This is absolute madness. Really excited for that event, and happy of the waves that it is making already in the Lille scene.
Robots are similar to exoskeletons in some ways. For example their actuations can serve as examples to exoskeletons as well. These robots use systems to the ones we want to set up. Just look at the fluidity of the movement!
Thank you for your time!